详解石头扫地机器人T7 Pro是如何避开障碍的
对于许多第一次接触机器人的用户来说,如何及时识别周围环境和避免各种障碍一直是个谜。作为一种高科技产品,清扫机器人并不等同于有轮子运转的吸尘器。各种传感器被用来收集数据,再加上以各种算法为核心的处理器,它能够理解周围事物的布局,能够规划路线和避免障碍物。
扫地机上的许多传感器使他能够识别周围的环境
在T7Pro上,这种避障能力得到了进一步的提高。随着人工智能双目相机的加入,扫地机器人不仅可以了解周围的地形,还可以利用图像识别和处理技术来识别周围的物体和判断距离。在传统的激光扫描下,不会发现杂乱的电线、宠物粪便、各种玩具、书籍和其他小物体等小物体,而且随着人工智能双目识别的加入,它们可以被预先识别,从而避免了这些障碍。
扫石机T7Pro有一个额外的摄像头。
从根本上讲,人工智能双目识别实际上是利用当前流行的智能视觉技术来实现的,激光识别部分是用来有效地扫描周围环境的,剩下的小物体则交给智能视觉技术来处理,遇到什么障碍,距离有多远,是否需要避免,有了这些更详细的信息,就可以更仔细地清理石扫机器人T7Pro。
双目技术原理
所谓的视觉识别系统通常可以包括一个或两个摄像头。然而,单摄像机头往往缺乏功能,单个图像具有很强的混淆和不确定性,特别是现实生活场景极其复杂,单个摄像机的视觉误判概率很大,可以计算出错误物体的实际距离。
在清洁过程中可以准确地实现识别和位置避免。
因此,这就要求扫石机器人从一台摄像机升级为两台摄像机,立体视觉,直接提供三维信息,即野外信息的深度。如上所述,在双目装载的情况下,扫石机器人T7Pro可以使用视觉识别技术来识别像人眼这样的障碍物,并准确地确定和避免它们的位置。
在此基础上,T7Pro具有全天候识别能力。在摄像机内采用rgb+IR双通滤波器,当暗光在夜间工作时,石扫机器人T7Pro可以打开红外补给灯,从而具有夜视能力,并且通过实际测量,在暗光下的工作能力丝毫没有降低。
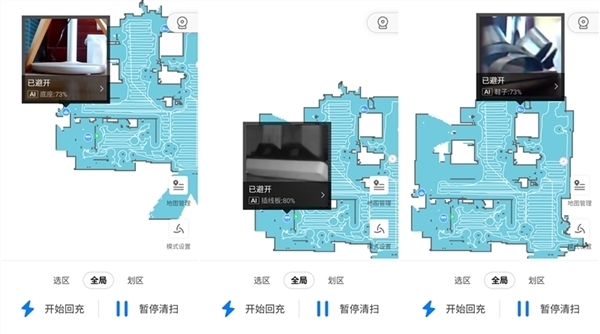
激光雷达对环境的扫描是非常准确的。
它不仅具有强大的人工智能双目识别功能,而且在激光雷达和避障算法等方面对扫石机器人的性能非常稳定。
无论是激光雷达扫描环境,还是清除地面障碍物的算法和路线规划能力,石材系列产品都具有非常优异的性能,您可以放心。
稳定而优秀的激光环境扫描、路线规划和避障算法,再加上先进的双目识别技术,石材清扫机器人T7Pro,在启动扫地机器人之前,不需要像仪式一样检查房屋,在地面上空置碎片以避免可能的损坏,真正感受到技术的方便,完全解放双手,最好从扫石机器人T7Pro开始。